Archives
My Journey from Kodi on x64 to LibreElec on a Pi4
My home setup is a little different from most, but still a supported solution. It involves a central MySQL server on the main household server, media also stored on that server and accessed via NFS, and media playback via Kodi on generic x86/x64 hardware that mounts the above NFS shares […]
Read MoreCompiling Marlin Firmware for the Ender 5 Pro v4.2.2 board, with BLTouch
This is a rough document on how to compile Marlin 2.0.9 for the Ender 5 Pro, using the BLTouch bed levelling sensor plugged into the BL_T port of the v4.2.2 motherboard. Be aware that the v4.2.7 motherboard uses different motor drivers and could be quite different from the v4.2.2 described […]
Read More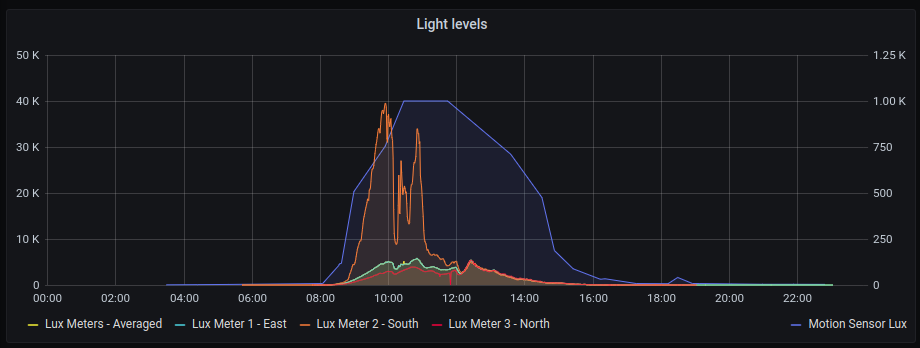
A better light sensor
For a while now I’ve been relying on my outdoor Aqara motion sensor to additionally report light levels. However, whilst it has coped with the outside Scottish weather admirably for two winters now, it is very slow to report changes in luminosity when there is no motion to trigger it, […]
Read MoreHacking the Owsoo Starry Light
The Owsoo ‘Smart wi-fi ceiling light’ is indeed wireless, but sadly it uses the Unisoc RDA5981 System On A Chip. To my knowledge this chip has not been compromised yet, nor does it have any form of homebrew friendly firmware available for it, like ESPHome or Tasmota. This means that […]
Read MoreIPv6, OpenWRT and Android
I was recently having some trouble with older versions of Android (on rooted Amazon Fire HD8 hardware to be honest) being unable to access the internet on the home network. A little investigation revealed that they were getting incorrect IPv6 DNS server information. As shown below from NetworkManager on a […]
Read More
Recent Comments